Het magische van een puntenwolk
Magisch? Jazeker! Met een puntenwolk kunnen we jou namelijk het verleden laten beleven. We kunnen het heden nauwkeurig in beeld brengen. Ze laten je zelfs een kijkje in de toekomst nemen. In dit blog neem ik jullie mee in de magische wereld van de puntenwolken die met behulp van LiDAR worden ingewonnen.

Harald Gortz
Harald is Business Consultant bij IMAGEM. Hij schakelt tussen business, commercie en de techniek en is inhoudelijk bezig met de klant. Hij werkt samen met de ontwikkelaar aan oplossingen voor de openbare orde en veiligheidsmarkt, onderwijsinstellingen of voor digital twins.
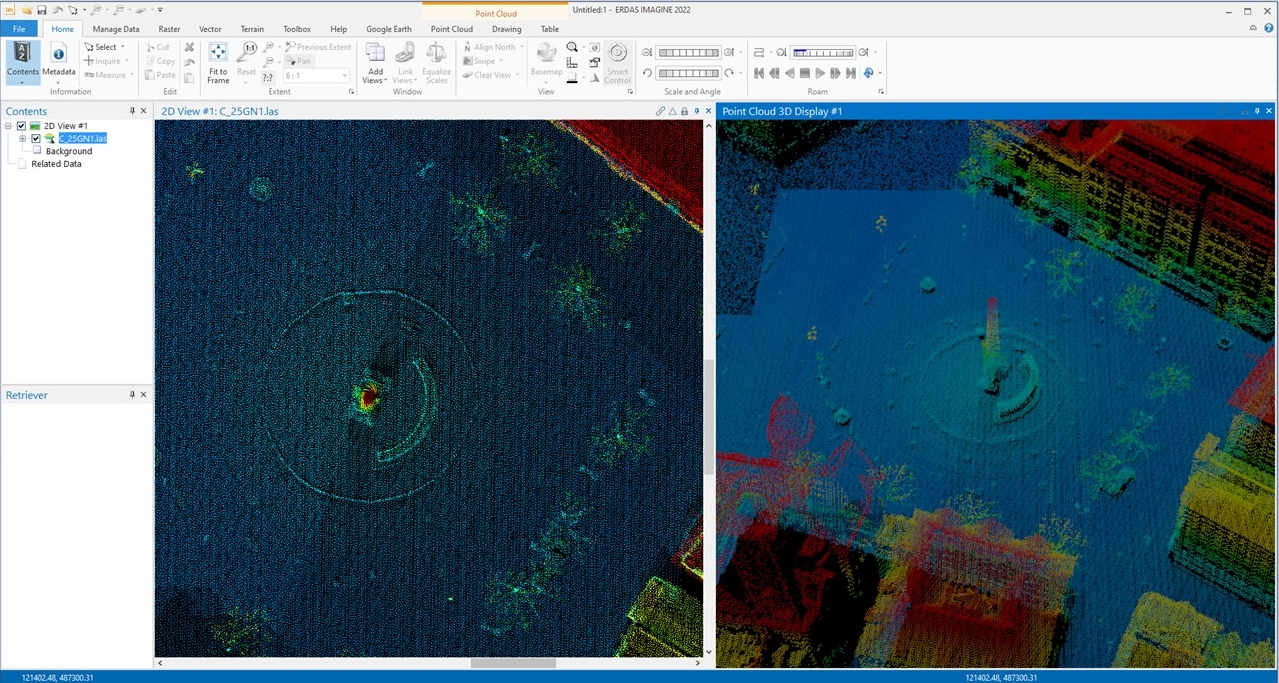
Even een technisch stukje. LiDAR (Light Detection And Ranging of Laser Imaging Detection And Ranging) is een technologie die de afstand tot een object of oppervlak bepaalt door gebruik van laserpulsen. Een signaal wordt uitgezonden en wordt enige tijd later door reflectie weer opgevangen. Deze verzameling van reflecties noemen we een puntenwolk. Zo simpel is dat. Een driedimensionale weergave van het terrein of object dus. Van elke punt is de exacte locatie (XYZ) bekend. Hieronder zie je dat goed. Het monument op de Dam, opgebouwd uit talloze punten.
Aan de slag met open data
In een vorig blog, “Ga niet graven op de plek van de oude sloot”, heb ik het Actueel Hoogtebestand Nederland (AHN) ook gebruikt. In het kort: het AHN is beschikbaar als Open Data. Dat betekent dat de data door iedereen gratis en zonder beperkingen te gebruiken is. Zowel de rasterdata als de puntenwolken zijn te downloaden via PDOK en het Nationaal Georegister (Bron: www.ahn.nl/open-data).
Puntenwolken zijn mooie datasets om mee te werken. Ze geven op snelle en eenvoudige manier de wereld in 3D weer. Zelfs minimale hoogteverschillen in het terrein zijn goed te visualiseren. Juist met deze hoogteverschillen kunnen we het verleden laten herleven.
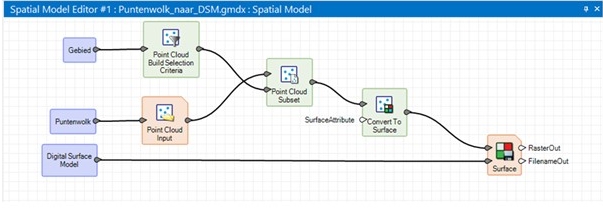
Met ERDAS IMAGINE kunnen we van een puntenwolk gemakkelijk een Digital Terrain Model (DTM) maken. Bij dit model geef ik aan in welk gebied (met een shapefile) waar ik mijn interesse in heb. Vervolgens wordt van dat gedeelte van de puntenwolk een DTM gemaakt.
Geroerde grond
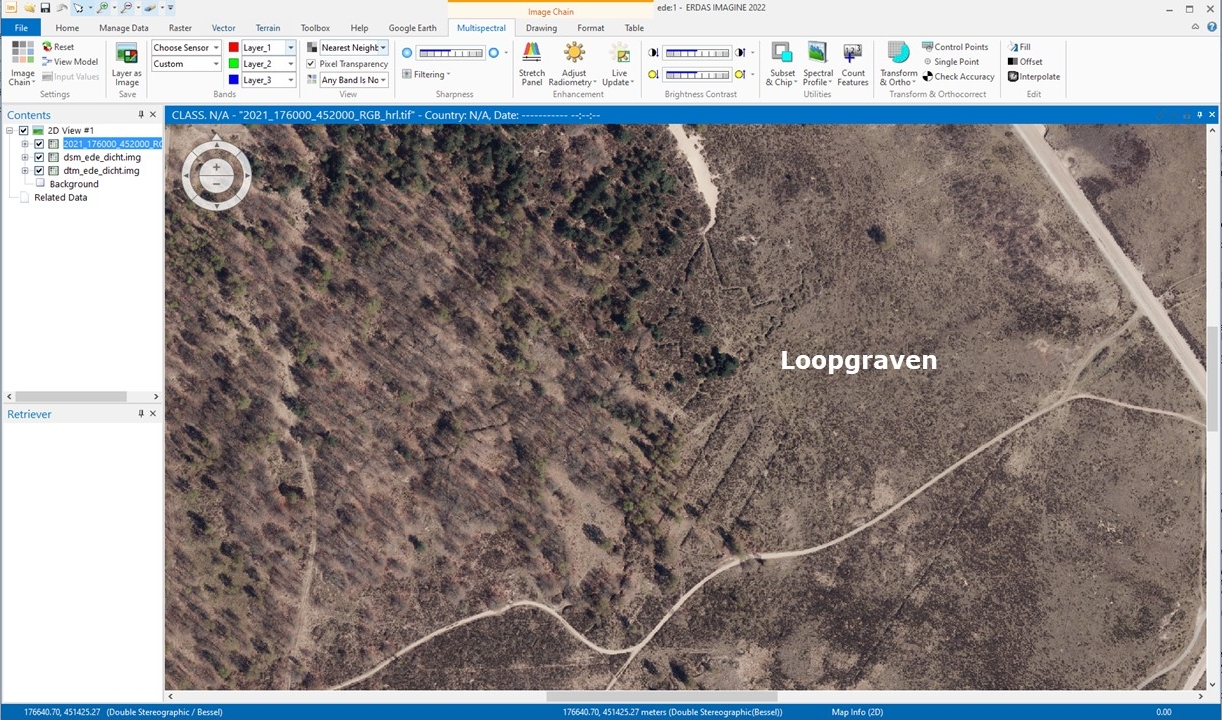
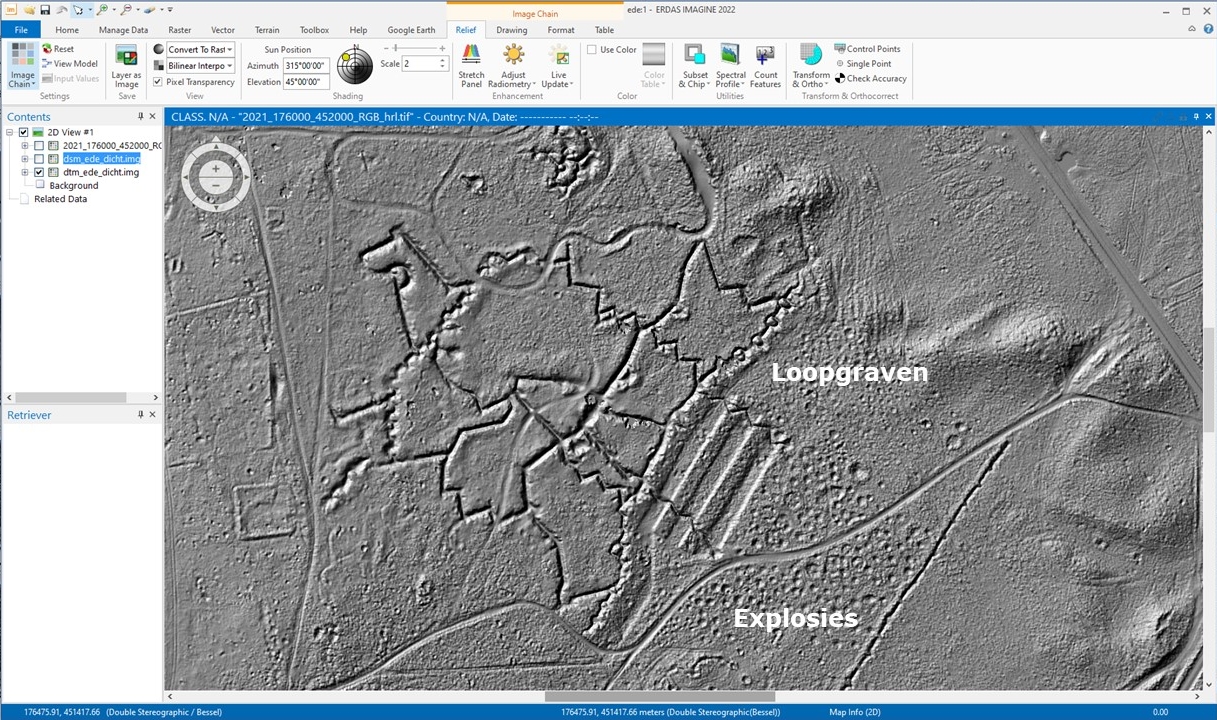
We gaan naar de Ginkelse Heide bij Ede. Wanneer grond is ‘geroerd’, is dit vaak voor langere tijd zichtbaar. Dat is een mooi woord om aan te geven dat de grond omgewoeld is. Tijdens de Tweede Wereldoorlog is dit veelvuldig gebeurd. De Ginkelse Heide bij Ede laat dat goed zien. Tijdens de Eerste Wereldoorlog zijn daar loopgraven door het Nederlandse leger gegraven. Vervolgens in de Tweede Wereldoorlog is daar daadwerkelijk gevochten. Op de luchtfoto kan je al wel een paar loopgraven onderscheiden.
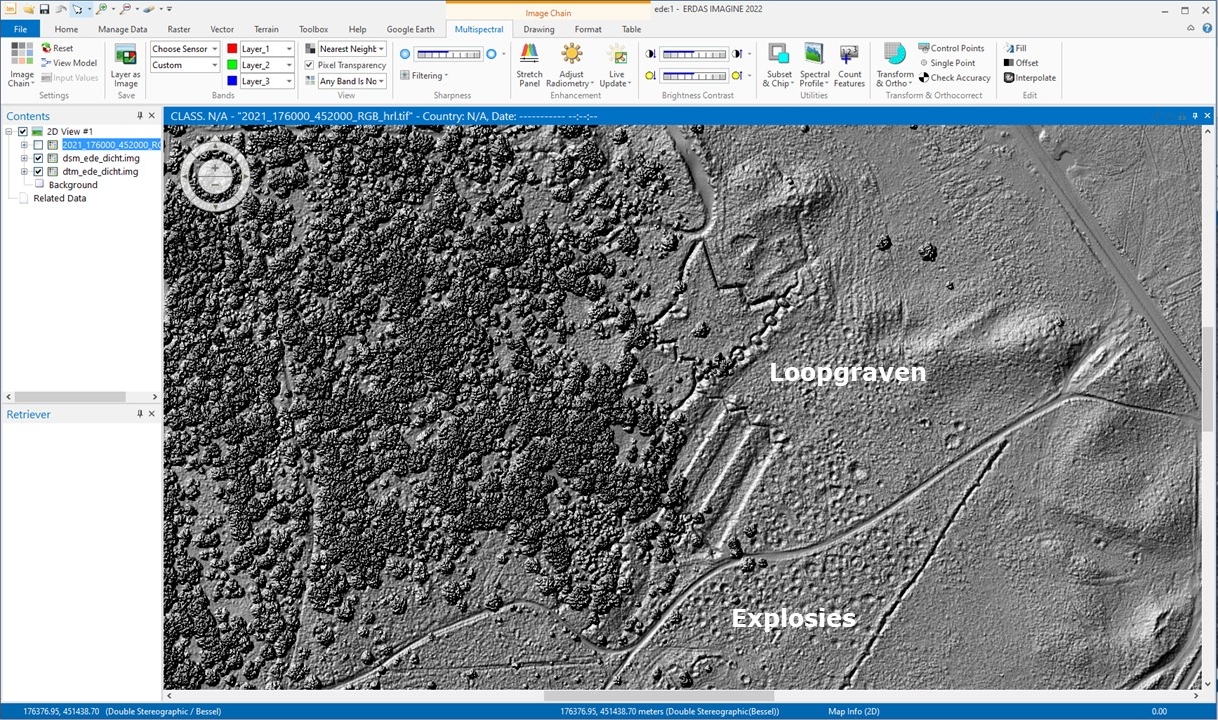
In het DTM dat ik gemaakt heb van de puntenwolk komen de loopgraven duidelijk naar voren. Ook ‘kuilen’ veroorzaakt door explosies zijn duidelijk zichtbaar. Die zagen we op de luchtfoto niet. Helaas staan er ook bomen bij de loopgraven. Je kan niet alles even goed zien. Of toch wel?
Door de bomen de grond zien
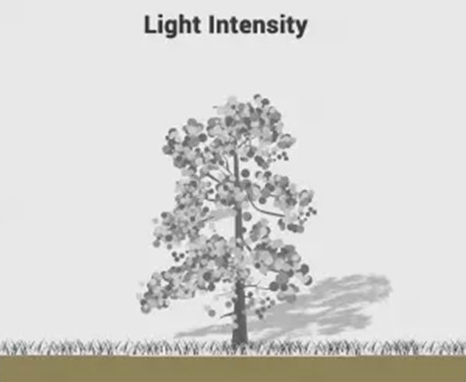
Wist je dat je met LiDAR ook onder de bomen kan kijken? Stel je voor dat je in een bos wandelt. Wanneer je dan omhoog kijkt en zonlicht door het bladerdak ziet, dat op de grond komt. LiDAR kan dat ook.
Een aanzienlijke hoeveelheid licht dringt dus net als zonlicht door het bladerdak. Door LiDAR te gebruiken om ‘grondpunten’ te krijgen, kijk je dus echt onder de bomen (bron).
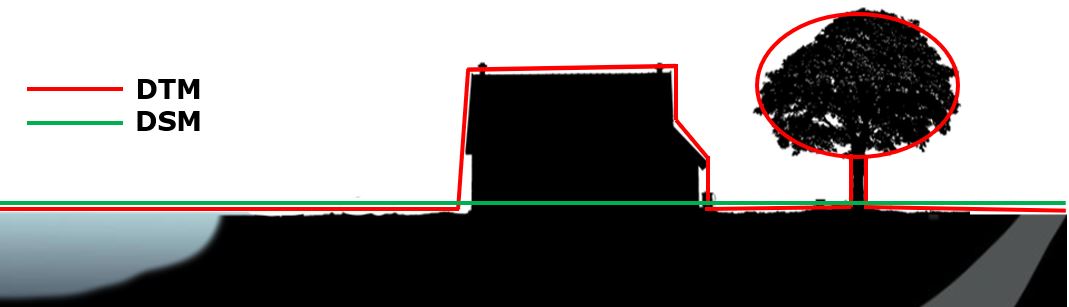
Weer even technisch. Een DTM bestaat uit alles wat LiDAR gezien heeft: huizen, bomen, etc (de rode lijn). In plaats van DTM willen we nu een Digital Surface Model (DSM). We willen immers alleen de grond. Een DSM is alles zonder de huizen, bomen etc. We noemen dit het maaiveld (de groene lijn).
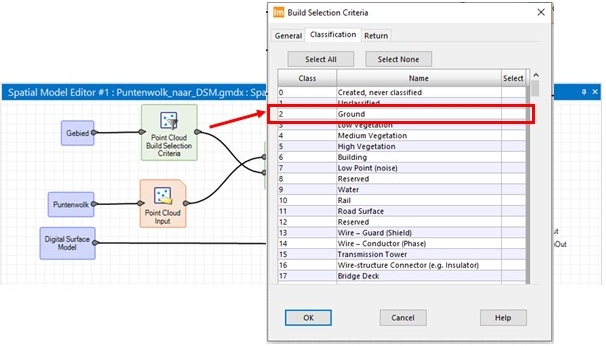
Wanneer we nu ons model gebruiken, geven we aan dat we alleen de grondpunten mee willen nemen.
Bij een LiDAR bestand weten we wat een puntje betekend. Grond, hoge of lage vegatie. Dit is bekend. De gaten die nu in de puntenwolk komen, we negeren immers de bomen, rekenen we dicht. Op deze manier laat ik de bomen uit de bomenwolk ‘verdwijnen’.
We zien nu hetzelfde gebied alleen zonder de bomen. In plaats van het kleine stukje loopgraven dat we eerst te zien kregen, is nu een heel stelsel van loopgraven en littekens van explosies zichtbaar geworden in het bos. We kijken van bovenaf gewoon onder de bomen.
Dat is het magische van een puntenwolk. Je kan het onzichtbare zichtbaar maken.
We kunnen de LiDAR ook op nog een andere wijze gebruiken om naar het verleden te kijken. Net als bij het maken van een foto speelt de lichtsterkte van een gereflecteerde puls een belangrijke rol.
De sterkte van LiDAR-retouren varieert namelijk met de samenstelling van het oppervlakteobject dat de retour weerspiegelt. De reflectiepercentages worden LiDAR-intensiteit genoemd. Maar verschillende factoren beïnvloeden de lichtintensiteit. Zo hebben bereik, invalshoek, bundel, ontvanger en oppervlaktesamenstelling (vooral) invloed op de lichtintensiteit.
Lichtintensiteit is met name handig bij het onderscheiden van kenmerken in landgebruik/bedekking. Ondoordringbare oppervlakken vallen bijvoorbeeld op in afbeeldingen met lichtintensiteit. Dit is de reden waarom lichtintensiteit goed is voor beeldclassificatie zoals objectgebaseerde beeldanalyse (Bron).
Met LiDAR intensiteit kunnen we dus eigenlijk een soort van zwart-wit foto van het gebied maken.
Daar hebben we ook een paar mooie voorbeelden van. In de periode tussen beide wereldoorlogen heeft de Nederlandse luchtmacht een groot aantal luchtfoto’s gemaakt. Onderstaande foto van fort de Bilt is uit 1937 en afkomstig uit de Collectie Nederlands Instituut voor Militaire Historie.
Deze foto’s zijn digitaal op te vragen uit de beeldbank van Defensie. De foto is echter in zuidoostelijke richting gevlogen, terwijl kaarten noord gericht zijn. Het mooie van een puntenwolk is dus niet alleen dat we deze in zwart-wit kunnen tonen, maar zowel in 3D als in de gewenste kijkhoek en richting kunnen draaien.

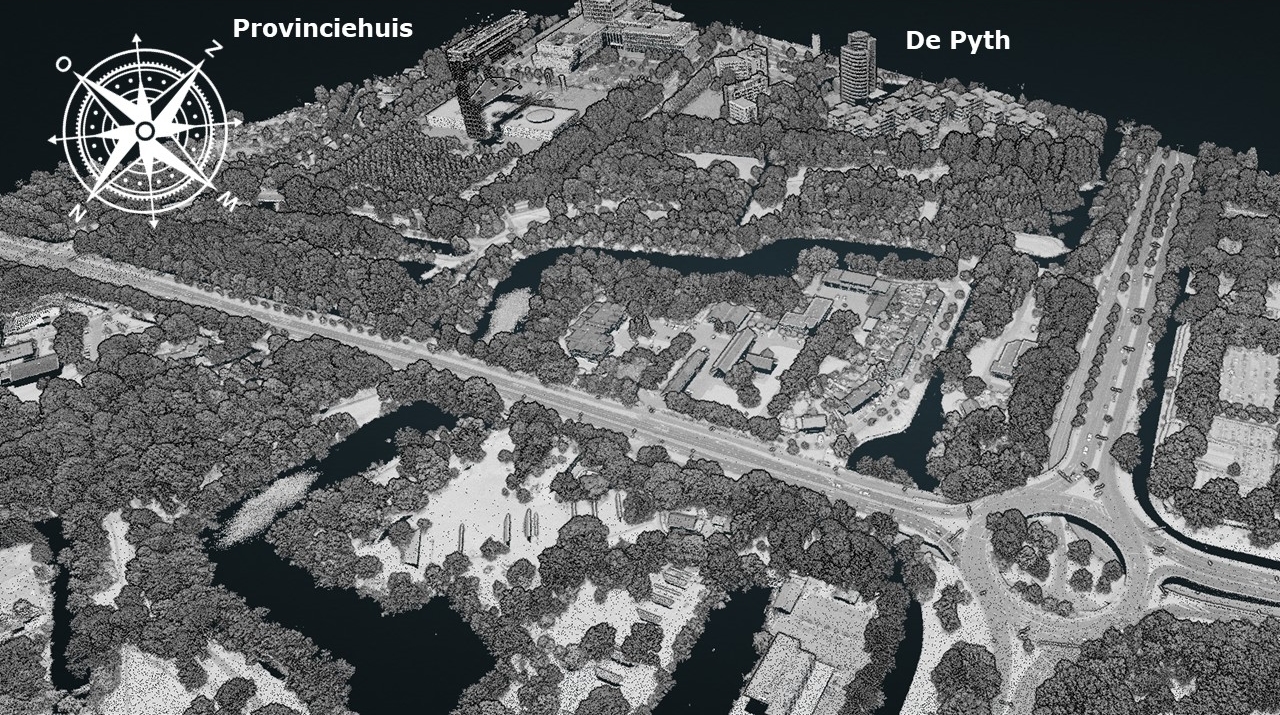
Met 84 jaar verschil, een puntenwolk uit 2021 en een luchtfoto uit 1937 kunnen we beide situaties met elkaar vergelijken. We zetten de puntenwolk in dezelfde richting en hoek neer als de foto.

Van het oorspronkelijke fort de Bilt zijn de vorm en een paar oorspronkelijk gebouwen bewaard gebleven. Het gebied is bebouwd, volgepland en de Utrechtse weg is ook behoorlijk veranderd. De karabijn schietbanen (hieronder uitvergroot) zijn nog aanwezig.
Met 84 jaar verschil laten we het verdelen hierbij achter ons, op naar deel 2, het nauwkeurige heden!
